This research project was conducted under the supervision of Prof. Neville Hogan and Dr. Meghan Huber from the Newman Laboratory for Biomechanics and Human Rehabilitation at MIT. The project focuses on understanding how humans control motion while interacting with physical constraints.
Humans are extraordinary for their ability to interact with with tools and other objects that place constraints on their motion. Especially when compared to robots, humans control these interactions with relative ease, stability, and robustness. From a purely mechanical perspective, interaction with tools introduces bidirectional forces on the controlling limb(s) that are not present in reaching motions. Additionally, some objects (such as power tools, cups of coffee, or objects with sliding friction) have complex mechanics which vary depending on how the user interacts with them. Because the interaction dynamics are fundamentally different from free, reaching motions, it is likely that the way in which humans control these interactions also differs.
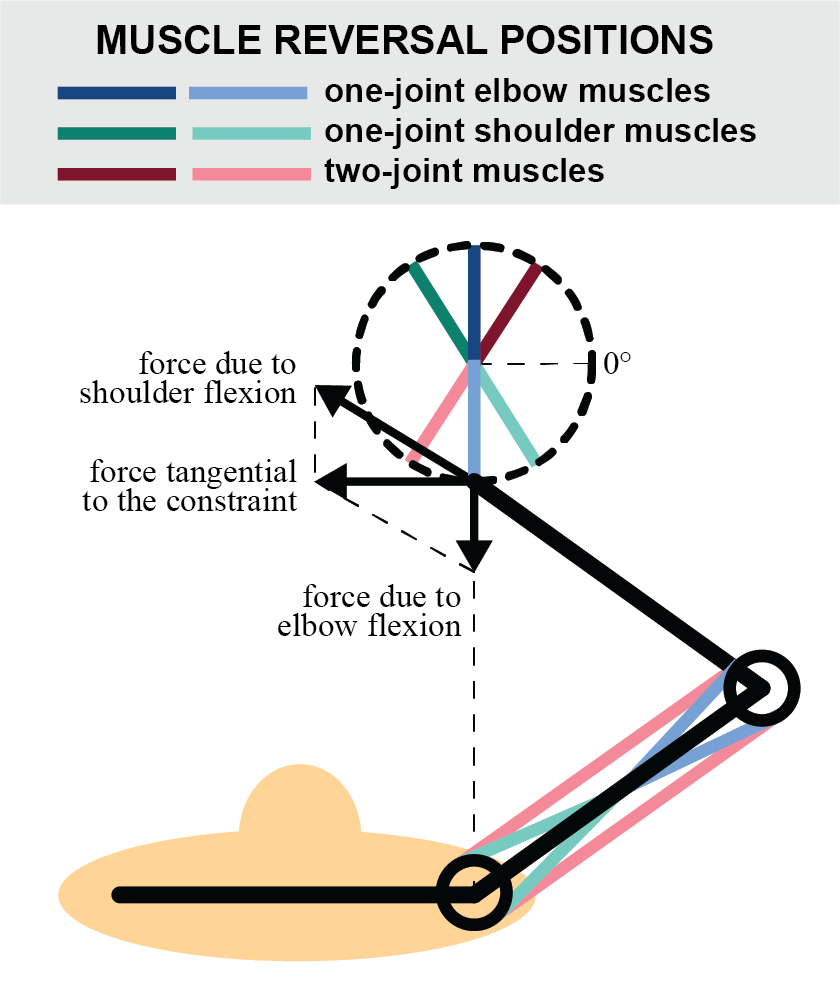
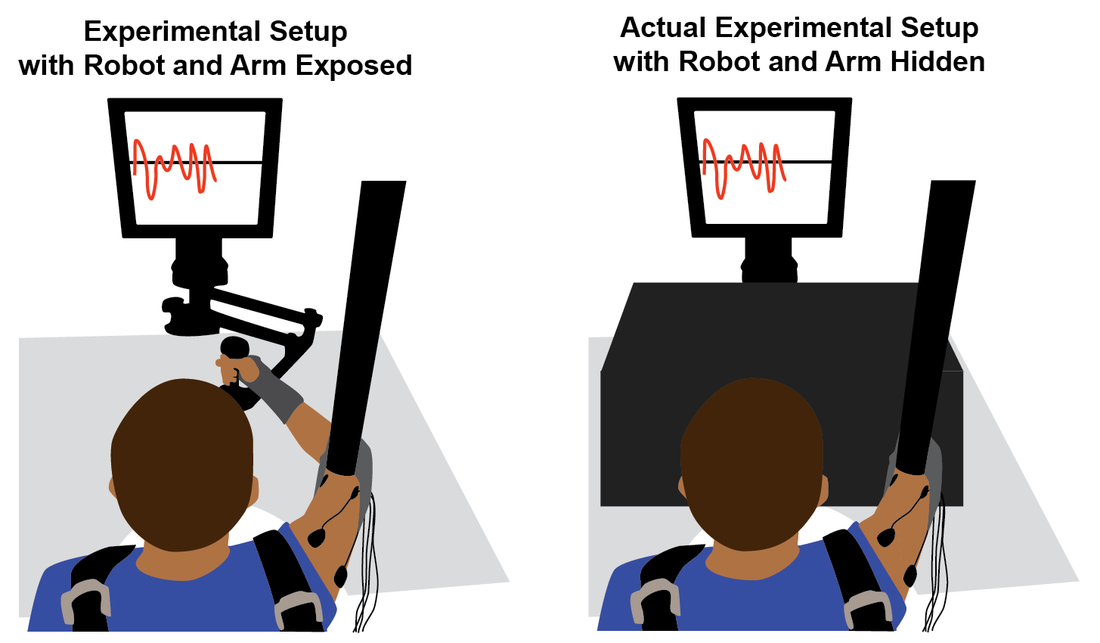
To examine this problem, this project experimentally investigated human subjects' interactions with a simulated circular constraint (i.e. a crank) with their upper limbs. In these experiments, it was hypothesized that in order to control interactions with such a kinematic constraint, subjects would exhibit a control strategy which minimizes the muscular effort required to perform the task. This hypothesis was based on a dynamic analysis performed on a simplified model in which the task was assumed to be in a horizontal plane and the upper body limbs were approximated as two-link rigid bodies.
Humans are extraordinary for their ability to interact with with tools and other objects that place constraints on their motion. Especially when compared to robots, humans control these interactions with relative ease, stability, and robustness. From a purely mechanical perspective, interaction with tools introduces bidirectional forces on the controlling limb(s) that are not present in reaching motions. Additionally, some objects (such as power tools, cups of coffee, or objects with sliding friction) have complex mechanics which vary depending on how the user interacts with them. Because the interaction dynamics are fundamentally different from free, reaching motions, it is likely that the way in which humans control these interactions also differs.
To examine this problem, this project experimentally investigated human subjects' interactions with a simulated circular constraint (i.e. a crank) with their upper limbs. In these experiments, it was hypothesized that in order to control interactions with such a kinematic constraint, subjects would exhibit a control strategy which minimizes the muscular effort required to perform the task. This hypothesis was based on a dynamic analysis performed on a simplified model in which the task was assumed to be in a horizontal plane and the upper body limbs were approximated as two-link rigid bodies.
|
|
The research ultimately found that from the experimental data from human subject trials, humans did not minimize muscular effort at the expected locations along the circular constraint despite the predictions of the model. This finding suggests that while interacting with objects that constrain their motion, humans do not adopt a control strategy which prioritizes minimizing muscular effort. It also suggests that the actual control strategy prioritizes some other fact, such as minimizing computational cost within the central nervous system.
This work has been published in the conference proceedings from the 2017 Dynamic Systems and Control Conference (DSCC) and can be found below. Follow up work is in progress to prepare the project for publication in a peer-reviewed journal.
This work has been published in the conference proceedings from the 2017 Dynamic Systems and Control Conference (DSCC) and can be found below. Follow up work is in progress to prepare the project for publication in a peer-reviewed journal.
| Koeppen, R., Huber, M. E., Sternad, D., & Hogan, N. (2017). Controlling physical interactions: Humans do not minimize muscle effort. Paper presented at 2017 ASME Dynamic Systems and Control Conference (DSCC). |
