The Spinning Jedi was a robotic system designed as part of a term project for 2.007 (Design and Manufacturing I). Each student's robot was entered into an end-of-term competition in which points are scored when the robots perform certain tasks on the game board.
The Spinning Jedi was designed to perform one specific task on the game board: to spin up a thruster with a large mass to high of a speed as possible. The number of points scored for performing this task were proportional to the square of the maximum angular velocity of the thruster. This non-linear scaling of points with booster speed made it the most efficient way to earn points.
The Spinning Jedi was designed to perform one specific task on the game board: to spin up a thruster with a large mass to high of a speed as possible. The number of points scored for performing this task were proportional to the square of the maximum angular velocity of the thruster. This non-linear scaling of points with booster speed made it the most efficient way to earn points.
To achieve this task, the robot had the following functional requirements:
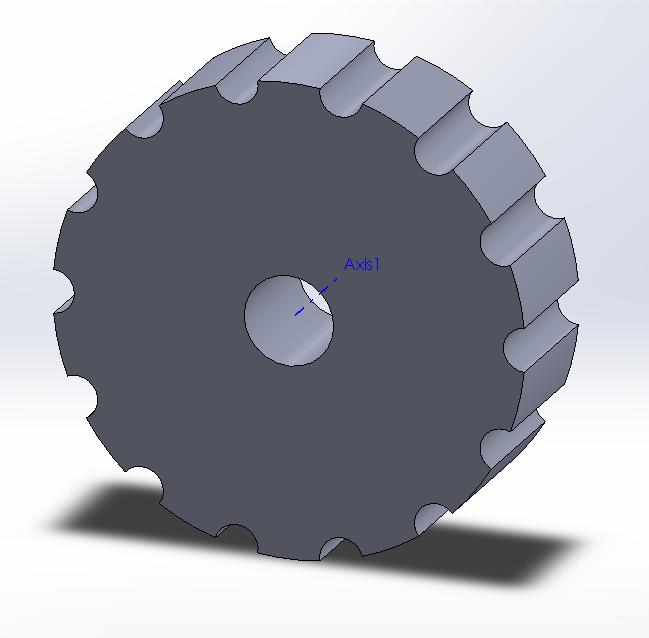
The most critical mechanism (MCM) for this robot was the mechanism for spinning the thruster engine. The designed mechanism was a custom gear to engage with a rubber pulley track attached to the outer diameter of the thruster engine. There were a few trade-offs to consider with this strategy:
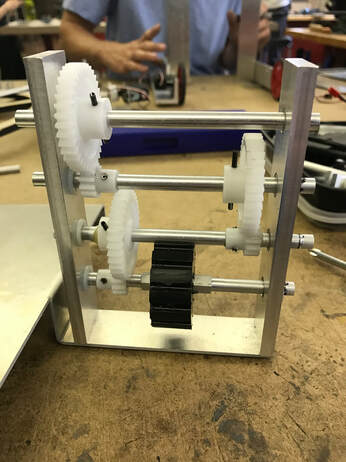
Therefore, the mechanism needed a gear train to step up the custom gear's speed from the motor.
- Spin the thruster engine up to a speed of approximately 200 RPM (21 rad/sec) in approximately 30 seconds
- Drive to the upper platform of the game field in approximately 30 seconds
- Drive up the game board ramp which has a slope of approximately 60 degrees
- (As time allowed) Spin a low inertia spinning mechanism to activate an elevator to reach the upper platform
The most critical mechanism (MCM) for this robot was the mechanism for spinning the thruster engine. The designed mechanism was a custom gear to engage with a rubber pulley track attached to the outer diameter of the thruster engine. There were a few trade-offs to consider with this strategy:
- Engaging the thruster engine at a point far away from its center reduces requires motor torque, due to the large lever arm
- Engaging at that same, far-away point requires the gear to spin at a high speed
Therefore, the mechanism needed a gear train to step up the custom gear's speed from the motor.
|
|
|
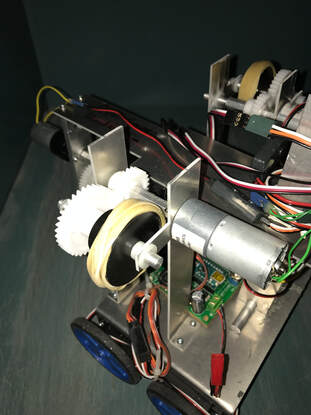
A second module for the robot was a mechanism to spin the "elevator wheel", the trigger to raise the elevator to the upper platform. My design involved a friction disc. The disc was wrapped with rubber bands to create a high-friction surface to engage with the elevator wheel.
|
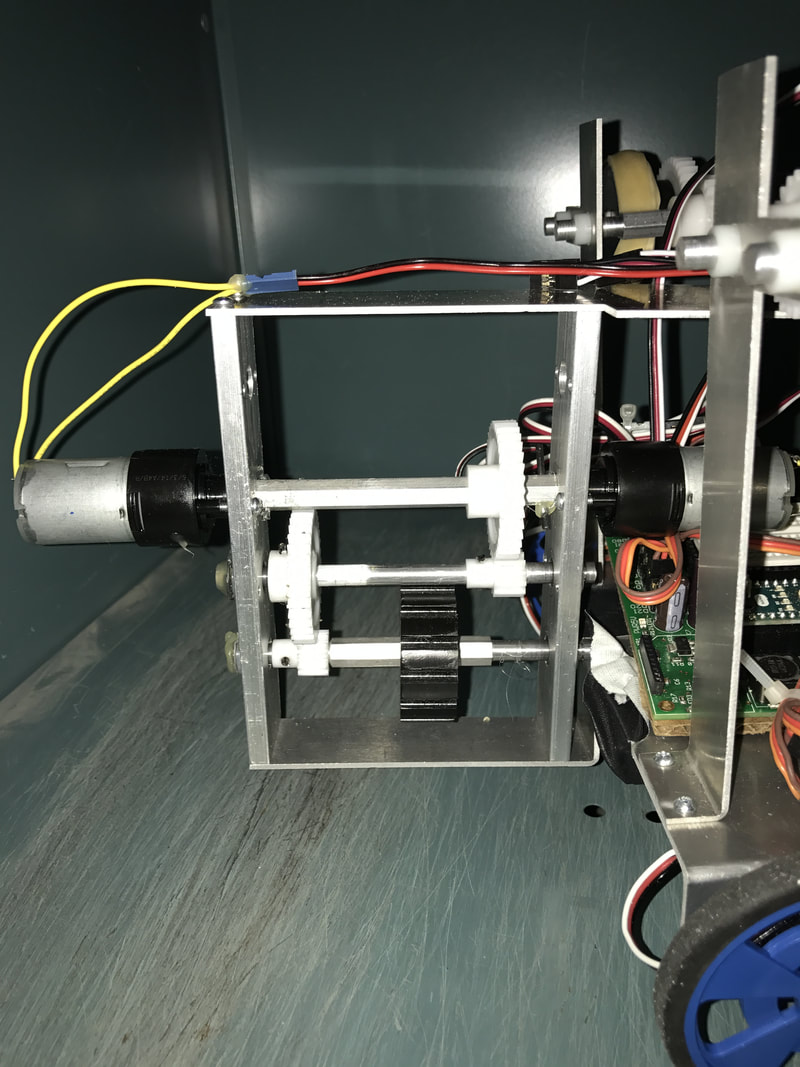
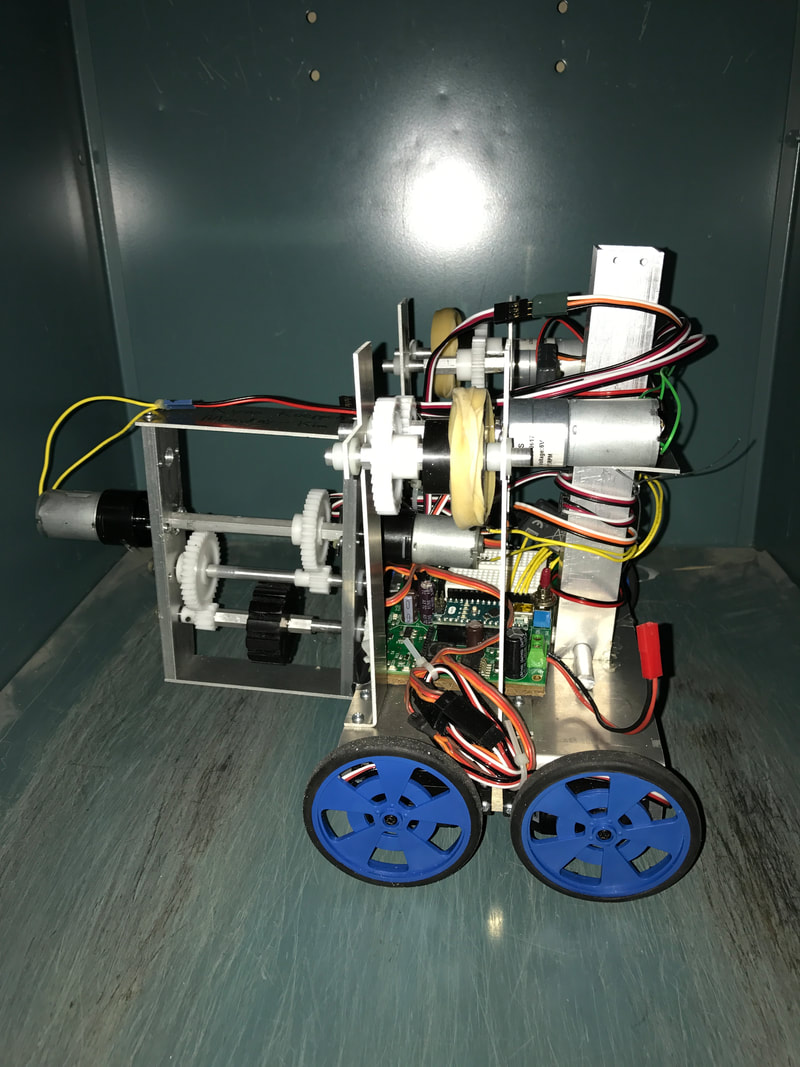
Pictures of the robot can be found below. Additionally, slides from a class presentation are attached which include more detail on the analysis that went into the design of each component in the robot.
|
|
Ultimately, the Spinning Jedi successfully spun the thruster engine to a maximum speed of approximately 13 rad/sec (124 RPM). The slower speed can be attributed to the fact that one step of the gear train needed to be removed from the final design due to either insufficient compensation for friction in the custom gear train or incomplete estimation of the friction in the thruster engine. Because this most critical requirement was met, the other secondary (but necessary) requirements listed above were also successfully accomplished.
| Koeppen - Spinning Jedi Presentation and Analysis |
